继广州车展亮相车位到车位后,理想智驾再次迎来重磅更新,OTA7.0升级后的智驾版本命名为AD Max V13.0,据悉,这是理想为了更便于用户理解和感知智驾迭代而做出的决定,后续版本号都将以这种更直观的方式展示给大家。本次OTA新增了全场景端到端和AI 推理可视化功能。在智能驾驶技术的浪潮中,理想汽车正以其前沿的科技创新,在全球汽车行业中崭露头角。全场景端到端技术和AI推理可视化功能的推出,解决了过去智能辅助驾驶的城市与高速无感互通和人机交互信任感等痛点问题,为用户带来了前所未有的驾驶体验。
智驾赛跑,理想率先交新卷
随着科技的不断进步,智能驾驶行业在2023年和2024年迎来了飞速发展。回顾2024年智驾行业,城市NOA已经得到深入发展,各汽车品牌纷纷落地高阶智能辅助驾驶,因为这意味着高端技术领导力的话语权。
全球各大车企纷纷加大研发力度,力图在这场技术革命中抢占先机。自动驾驶技术正从实验室走向现实,从高速公路扩展到城市道路,从单一场景迈向全场景应用。在这一背景下,理想汽车以其卓越的技术实力和创新能力,成为行业的领跑者。目前理想智能驾驶水平位居世界第一梯队,全场景端到端功能的实现将理想汽车和特斯拉智能驾驶水平差距缩小至1个月(特斯拉北美于11月推送)。
值得一提的是,理想汽车是智能电动车企中OTA升级最快的企业之一。截至2024年12月31日,2024年共计推送19次OTA升级,覆盖智能电动、智能驾驶和智能空间等核心领域。
从理想汽车的智驾发展历程来看,理想迅速地在一年多时间实现了飞跃式的发展。2023年年底,全场景NOA推送,标志着理想智能驾驶从高速向城市延展。去年7月15日,理想推出无图NOA功能,首次摆脱了对先验信息的依赖,实现全国都能开,紧接着10月23日推送的端到端+VLM智能驾驶功能,真正意义上实现了One Model一体化端到端模型大规模实践应用,并首次将大模型部署至车端量产芯片。
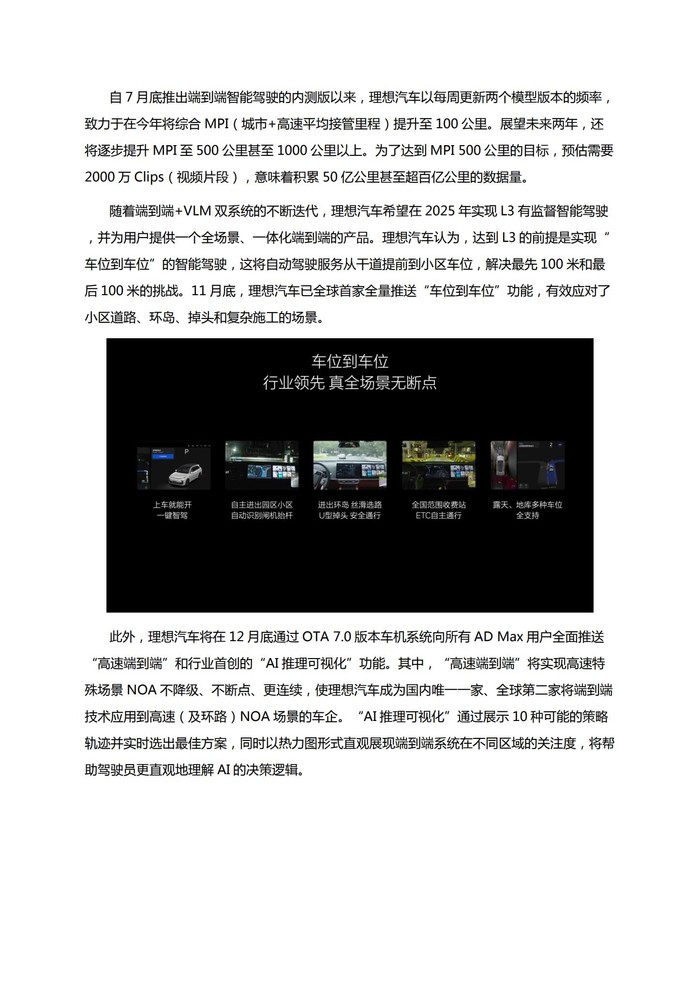
此前广州车展上,理想汽车展示了其车位到车位的智能驾驶技术,并在11月28日首次全量推送。车位到车位技术能够轻松应对狭窄小区道路、环岛、掉头和复杂施工场景,极大地提升了用户的用车便利性和安全性。实现L3有监督智能驾驶的前提是实现“车位到车位”,即解决最开始100米和最后100米的问题。区别于传统智驾从干道开始智驾的能力,车位到车位可以从小区车位开始,打通园区道路、泊车、城市道路、高速路和收费站ETC等全场景。7.0版本的更新,更是将这一技术推向了新的高度,新增了高速端到端功能,进一步提升了智能驾驶的体验和安全性,全场景、一体化端到端产品能够真正实现有监督智能驾驶。
当“算法、数据和算力”全部齐备时,才能真正使用人工智能的方式来做智能驾驶。
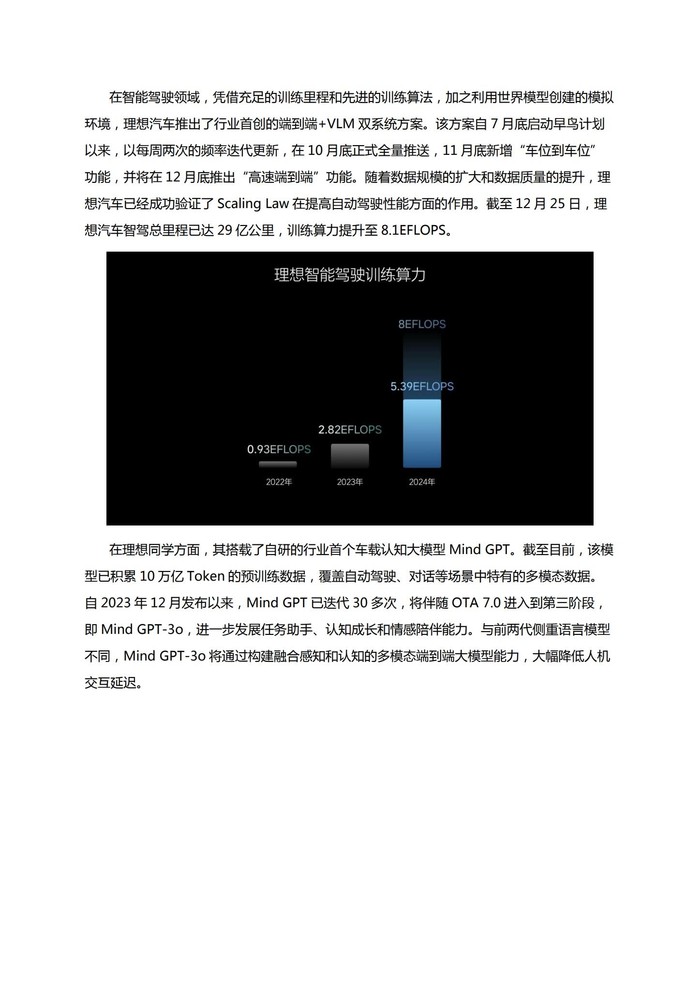
数据方面,理想AD Max车型销量去年大幅增长以后,2024年年初理想的高质量训练数据量达到10亿公里左右;算力基础方面,2024年年初也达到了5EFLOPS;再加上理想此前在端到端模型上的预研成果,所以2024年年初达到了天时地利人和的状态,理想才能实现端到端+VLM智驾。截至OTA7.0正式推送,理想汽车端到端模型已向用户迭代超过35个版本,训练数据量达到800万Clips(视频片段),相较于OTA6.5版本,数据训练量提升60%。
智能驾驶方面的提升不只在于训练算力,从使用数据来看,用户也越来越爱用理想智驾。据理想汽车2024年度用车报告显示,2024年1月1日-12月31日,理想智能驾驶累计用户超过100万人,智能驾驶总里程17.2亿公里。车位到车位激活次数达到22.9万次,单日单车最长智驾时长20.8小时,单日单车最长智驾里程超过2200公里。截至2024年底,主动安全累计帮助用户规避338.6万次潜在事故,累计避免极端烈性事故1230次。理想智能泊车覆盖300多种复杂车位,智能泊车累计使用7785.8万次,使用车位随心画功能31.9万次,离车泊入465.1万次。
行业内智驾都在卷什么
谈到智能驾驶,消费者会首先想到城区NOA、点到点辅助驾驶等名词,升级车位到车位到底是否有必要值得讨论。
想象两个日常的场景可以帮助更好理解车位到车位的价值与优势。第一个是从家里车位开到单位停车位时,车位到车位可以实现全程无断点智驾,上车就可一键开启智驾模式,泊出车位、驶出小区、进入单位停车库直至泊入,不再需要多次启动智驾模式或者人为进行接管。另外一个场景是在长途出行中,城市与高速被打通,能够实现NOA全场景无断点贯通体验,无论是城市拥堵路段还是高速公路,都可以使用连续、稳定的智能驾驶支持。一个值得关注的亮点是,全国高速收费站ETC通行能力,这意味着在高速收费站通行的时候,智驾模式也不会退出,驾驶者也不需要接管。
上述两个场景可以看出,这种更加拟人化、更加丝滑的驾驶方式仿佛真的有人类司机在操控方向盘,给用户带来更好的驾乘体验,大大提升了智驾的舒适感和快捷感。理想汽车的车位到车位技术可以说是对智能驾驶技术的一次重大突破,在城区NOA已成为智能驾驶标配的时候,车位到车位技术已经开始成为了新的竞技场。
实际上,上述两个新增功能的实现得益于理想的端到端技术架构。这一技术名词在人工智能行业当中并不陌生,它是指从输入到输出完全由一个模型实现的技术架构。这项技术通过一个统一的模型处理从传感器输入到行驶轨迹输出的全部过程,无需依赖中间规则,极大提升了智能驾驶的安全性、舒适性和效率。
这种技术架构更接近人类的驾驶方式,理想汽车的端到端技术架构,使得智能驾驶系统能够像人类一样,从感知环境到做出决策,整个过程更加流畅、自然,能够提供更自然、更安全的驾驶体验。
端到端技术架构的另一个优势是其上限更高,能够随着技术的进步不断优化,提供更高级的智能驾驶体验。要知道,仅用One Model端到端模型,智能驾驶无法处理未知场景,因此理想根据人类大脑工作的方式,构建端到端+VLM双系统技术架构。
理想汽车的端到端+VLM技术架构,不仅覆盖了高速、主干道、小道等各种复杂的驾驶场景,而且在安全性和灵活性方面也表现出色,能够更准确地识别和预测周围环境,能够灵活应对各种突发情况,如紧急避让、拥堵路况等。
不光要解决技术问题,信任关系也很重要
智能驾驶技术的不信任,很大程度上源于人类对技术黑箱的恐惧。例如,Cruise的交通事故和百度武汉萝卜快跑的舆情,都反映了公众对智能驾驶技术的担忧。用户对智能驾驶技术的疑虑往往源于对技术黑箱的恐惧。理想汽车通过AI推理可视化功能,将智能驾驶的决策过程透明化,有效缓解了这一问题。


AI推理可视化功能是理想汽车的另一项行业首创。该功能将智能驾驶模型的思考推理过程以视觉形式展现给驾驶员,使驾驶员能够提前理解AI的思考和执行过程,从而更加安心地使用智能驾驶。通过中控屏或副驾屏,驾驶员可以直观地看到智能驾驶模型的思考推理过程,包括从物理世界输入到决策结果输出的整个过程。驾驶者对智驾技术的信任,不仅基于技术本身,更基于对技术内在逻辑的理解。AI推理可视化技术,正是通过展示智能驾驶的思考过程,增强了驾驶者对技术的信任。
此外,尽管转向以纯视觉为主的技术路线,理想汽车坚持在目前的所有车型中保留激光雷达,以应对中国复杂的路况和摄像头识别距离的限制,实现更高级别的安全保障。这些措施不仅提升了用户的用车安全性,也加强了用户对新技术的信任度。
端到端+VLM对于销量的促进作用立竿见影。智能驾驶技术是当前汽车市场的竞争热点,过去理想的智驾技术的不断迭代和更新不仅为用户提供了更优质的驾驶体验,也使其在激烈的市场竞争中脱颖而出,吸引了更多消费者的关注。AD Max车型交付量占比的变化,说明受众对智能驾驶技术的接受程度越来越高,也逐渐变得越来越信任。2024年智能驾驶技术突破对于销量有非常好的促进作用。2月,AD Max车型交付量占比20%左右,到2024年下半年超过50%。端到端+VLM真正解放用户长时间的驾驶疲劳,理想认为,当综合MPI(城市+高速综合接管里程)达到100公里,甚至几百公里时,大家会真正愿意为自动驾驶买单。
理想汽车2024年度报告中显示,2024年智能驾驶总里程达17.2亿公里,车位到车位激活次数达22.9万次,单日单车最长智驾时长为20.8小时。正是通过坚持核心技术自研和长期高研发投入,理想才能够提升智能驾驶的体验和安全性,增加了市场竞争力的同时推动了行业技术创新、加速智驾商业化落地。
此外,理想还计划三年实现L4级别的自动驾驶。实现L4的条件是达到500万辆以上保有量、掌握VLA(视觉语言行动模型)基础模型的能力、拥有最顶级人才,拥有充足算力。理想表示,在技术、产品、环境和政策、消费者信任到位的情况下,将用三年的时间实现L4自动驾驶。
当一家电动汽车制造商想要成为一家AI企业,这意味着企业已经迈入下一个发展的阶段。正如理想CEO李想所说,“我们要做的不是汽车的智能化,而是人工智能的汽车化,并将推动人工智能普惠到每一个家庭。从行业视角来看,汽车将从工业时代的交通工具,进化成为人工智能时代的空间机器人。在对整个世界的理解上,我们通过人工智能将物理世界与数字世界进行融合,让有限的空间实现无限的延伸。”














有话要说...